Вимоги до вмілості
Пояснити, як діє секстант; назвати його складові частини
Показати, як вимірювати секстантом вертикальні та горизонтальні кути.
Пояснити дію хронометра, як ним користуватись та вести книгу хронометра.
Вміти користуватися радієвими часовими сигналами.
Пояснити співвідношення географічної довжини до часу.
Докладно пояснити наступні терміни: географічна довжина та ширина, рівнобіжники та полуденники, зворотники та полярне коло.
Знати основні проекції Меркатора: гномічна, конічна та поліконічна; пояснити їх позитиви та негативи.
Знати завдання морського альманаха та вміти ним користуватись.
Показати спосіб розпізнавання місця побуту на підставі попередньо зміряної позиції.
Вміти користуватися таблицями морських течій, припливів, відпливів.
Пояснити вплив прогнозу погоди на результат водної подорожі.
Знати 10 навігаційних зір та планет; знайти та назвати 10 навігаційних сузірь на небі.
Знайти й визначити позицію судна на картах за допомогою секстанта, хронометра та морського альманаху, вдень і вночі.
Перерахувати й розказати про електронні способи визначення позиції судна на воді
Матеріали для підготовки до здачі вмілості
 ст. пл. Олег Осадця, ЧМ,
ст. пл. Олег Осадця, ЧМ,
виховник 15-го куреня УПЮів ім. П. Полуботка (Львів)
Завантажити проект в форматі PDF можна тут.
Мета проекту:
Навчити слухачів інструктажу орієнтування на воді за допомогою приладдя, теоритичних матеріалів та роздаткових даних.
Ширити та повторювати знання з навігації.
Актуальність теми проекту:
Наскільки я знаю на пластовий загал матеріалів з морського пластування не є багато, тому дана матеріал для вмілості є актуальною.
Короткий опис проекту:
Загальні відомості про навігацію, Навігація, Морська навігація, Земля, Форма і розміри землі, Основні кола, точки та лінії на земній поверхні, Географічні координати на поверхні Землі, Довгота, Широта, Віддалі та видимості, Миля, Видимий горизонт, Навігаційна морська карта, Небесні світила, Еволюція навігаційного обладнання, Морські навігаційні небезпеки, Основне навігаційне обладнання, Морські карти, Прокладання курсу, Інструменти для прокладання курсу, Визначення курсу, Астронавігація
1. Вступ:
Кожен освідчений моряк досить точно може визначити широту по тривалості дня і висоті сонця. Однак для визначення довготи треба знати час на кораблі і в порту, з якого він вийшов, різниця в 4 хвилини означає 1 градус західної чи східної довготи, сьогодні це легко дізнатися за допомогою дешевих наручних годинників, але довгі століття подібне було недосяжно.
Перші морські шляхи у свій час почали прокладати єгиптяни і фінікійці, плаваючи по широкому руслу Нілу і вздовж берегів Середземного моря. Однак основи морської навігації зародилися разом з появою першого компаса в одинадцятому столітті нашої ери. Але ці подорожі несли за собою ряд серйозних проблем для того часу. Компас дозволяв орієнтуватися кораблям щодо північного полюса землі, але не знаючи швидкості руху судна і не маючи докладних карт, мореплавці часто наштовхувалися на підводні скелі і, йдучи далеко в море, залишалися на тривалий час без води і провіанту. І тільки лише в дев’ятнадцятому столітті з’явився механічний прилад для вимірювання швидкості судна під назвою лаг.
За двісті років до Другої Світової війни настав переломний момент в історії морської навігації. Королівський флот Її величності втомившись від довгих блукань в море і частих катастроф кораблів задався метою знайти дієвий спосіб визначення довготи. І тут сільський тесля Джон Харрісон запропонував свій варіант вирішення даної задачі. Він створив на той момент найточніший хронометр у світі, за допомогою якого, знаючи точний час, можна було визначити точні координати корабля.
2. Основні відомості про навігацію:
Навігація (лат. Navigatio — мореплавство від лат. Navigare — плавати, переплисти).
Навігація на сьогоднішній день – поняття загальновживане. Розвиток техніки і науки йде все вгору і зараз ми маємо різноманітні способі визначення місця розташування об’єкта, маршрут яким він йде, звідки виходить і куди приходить.
Керування судном є основою штурманської спеціальності. Від знань і досвіду штурмана залежить безпека плавання судна. За даними берегової охорони морських держав однією з причин випадків на морі служить відсутність у капітанів достатнього вміння використовувати свої знання основ навігації.
Морська навігація – розділ навігації, що вивчає судноплавання, теоретичні і практичні прийоми водіння морських суден.
Морська навігація зародилася в глибокій старовині. До перших мореплавців відносять єгиптян і фінікійців, проте і інші народи того часу мали навики подорожей морем.
Основи морської навігації в сучасному розумінні були створені при початку використання магнітної стрілки компаса для визначення курсу судна. Перші згадки про це традиційно відносяться до XI століття. Важливим етапом розвитку навігації став початок складання карт в прямій рівнокутній циліндровій проекції (Р. Меркатор, 1569), в раніші часи в картографії не було єдиного стандарту. Великим кроком вперед послужив винахід в XIX столітті механічного лага — приладу, що вимірює швидкість судна. Але про це ми поговоримо згодом.
Земля обертається навколо Сонця за 365 днів. Уявна пряма навколо якої Земля здійснює добове обертання – земна вісь, що являє собою північний і Південний географічний полюс. Лінії, що сполучають полюси є меридіанами. За початковий або нульовий взято меридіан, який проходить через Гринвіцьку обсерваторію, що знаходиться у передмісті Лондона в Гринвічі. Усю Землю можна поділити на 24 годинні пояси, в яких час від Гринвіцького відрізняється на рівне число годин. Точний місцевий (меридіанний час) відрізняється від поясного і залежить від географічної довготи місця знаходження судна.
Навколо своє осі Земля обертається за 24 години. Так ми мамо день і ніч. Навколо Сонця Земля обертається завдяки чому ми маємо різні пори року.
Форма і розміри Землі
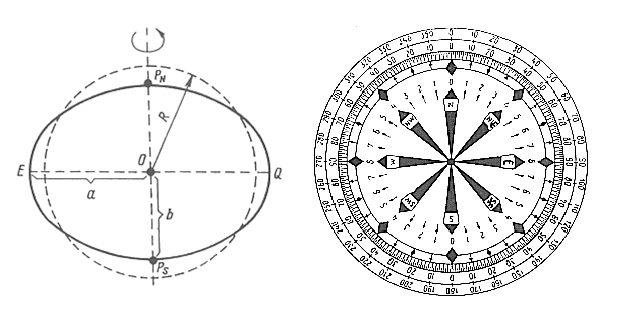
За своєю формою Земля близька до еліпсоїда, який виходить при обертанні еліпса навколо малої осі.
Довжина великої півосі Землі а = 6378245 м, малої b = 6356863 м. а – b = 21,4 км. Ставлення а – b називається стисненням Землі. У судноводінні цією величиною можна знехтувати без а збитку точності рішень багатьох навігаційних завдань і прийняти Землю за кулю. За цієї умови розрахунковий радіус Землі R = 637110 м.
Основні точки, кола та лінії на земній поверхні
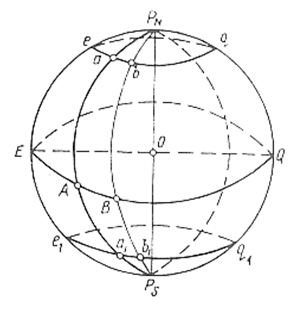
Уявні точки PN і Ps від перетину осі Землі з її поверхнею називаються полюсами Землі: PN – північний полюс (північний); Ps – зюйдовий полюс (південний).
Окружність великого кола EABQ, яка вийшла від перетину поверхні Землі площиною, перпендикулярної осі обертання PNPS і проходить через його центр О, називається екватором. Площина екватора ділить земну кулю на північну і південну півкулі. Кола малих кіл, паралельних екватору, називаються паралелями (eabq, e1, a1, b1, q1). Кола великих кіл PNaAa1, Ps і PNbBb1Ps, які виходять від перетину поверхні Землі площинами, що проходять через вісь PNOPs, називаються меридіанами. Нульовим (початковим) або Грінвіцьким меридіаном прийнято вважати меридіан, що проходить через астрономічну обсерваторію в Грінвічі (недалеко від Лондона). Площина цього меридіана ділить земну кулю на східну і західну півкулі.
Напрями N, S, E, W (мал. 156) вважаються головними румбами, а лінії NS і EW ділять площину дійсного горизонту на чотири чверті: NE, SE, SW і NW. У навігації застосовується кругова (градусна) система поділу горизонту від 0 ° до 360 °.
При цьому рахунок ведеться від N за годинниковою стрілкою. Головним румбах відповідають такі градусні значення: N – 0 ° (360 °), S – 180 °, Е – 90 °, W – 270 °. У румбовой системі горизонт ділиться на 32 напряму (румба): 4 головних (N, S, E, W); 4 четвертних (NE, SE, SW, NW), що поділяють кожну чверть горизонту навпіл; 8 проміжних (NNE, ENE, ESE , SSE, SSW, WSW, WNW, NNW), які є середніми напрямками між головними і четвертними; 16 румбів, які є проміжними між уже відомими румбами. 1 румб = 11,25 °.
3. Географічні координати на поверхні Землі:
Довгота, Широта – це координати, які визначають положення точок наземній поверхні, на небесній сфері, на поверхні Сонця, Місяця,Планет.
Широта
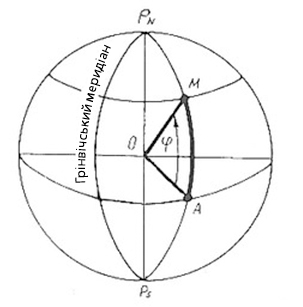
Широтою називається кут між площиною екватора і радіусом, проведеним з центру Землі в задану точку на земній поверхні.
Широта у навігації позначається буквойφ (фі) і вимірюється дугою меридіана від екватора до паралелі, на якій знаходиться задана точка. Широта вимірюється від 0 ° до 90 ° і має найменування: північна (N) або південна (S) залежно від того, в якій півкулі знаходиться точка. У нашому випадку точка М знаходиться в північній півкулі і вимірюється дугою AM.
Довгота
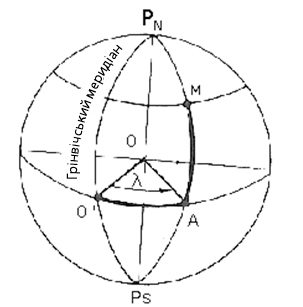
Довготою називається кут між площинами початкового меридіана і меридіана даної точки. Довгота позначається буквою λ (лямбда) і вимірюється дугою екватора від Гринвічем меридіана до меридіана, на якому знаходиться задана точка.
Довгота вимірюється від 0 ° (на грінвічському меридіані) до 180 ° і має найменування: східна (Е) і західна (W) в залежності від того в якій півкулі знаходиться точка.
У нашому випадку точка М знаходиться в східній півкулі і вимірюється О’А.
4. Віддалі та видимості
Миля – (від лат. milia passuum, тисяча подвійних кроків) – британська та американська міра довжини. Також застосовується і в морській справі.
Існують міжнародна миля та міжнародна морська миля. Міжнародну милю звичайно називають просто «миля».
1 миля = 1609,344 м
1 миля = 1760 ярдів
1 миля = 5280 футів
1 морська миля = 1852м.
Кабельтов – одна десята частина морської милі, 1 миля = 10 кбт. Наприклад : відстань до судна 14 кабельтов.
Вузол – 1 морська миля в годину
Видимий горизонт. Враховуючи, що земна поверхня близька до кола, спостерігач бачить цю окружність, обмежену горизонтом. Ця коло і називається видимим горизонтом. Відстань від місця знаходження спостерігача до видимого горизонту називається дальністю видимого горизонту.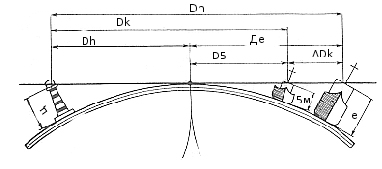
Зрозуміло, що чим вище над землею (поверхнею води) буде розташоване око спостерігача, тим більше буде і дальність видимого горизонту. Дальність видимого горизонту на море вимірюється в милях і визначається за формулою: De = 2,08 √ e, де: De – дальність видимого горизонту, м; е – висота ока спостерігача, м (метр).
Для отримання результату в кілометрах: Dв = 3,85 √ е
Дальність видимості предметів і вогнів. Дальність видимості предмета (маяк, інше судно, споруда, скеля і т.д.) на морі залежить не тільки від висоти ока спостерігача, але і від висоти спостережуваного предмета.
Дійсний напрямок. Знаючи положення дійсного меридіана (NS) будь-який напрямок на поверхні землі (моря) можна визначити кутом між північної частиною цього меридіана і напрямком на предмет. При цьому величина цього кута вимірюється в градусах за коловою системою, тобто від 0 ° до 360 °.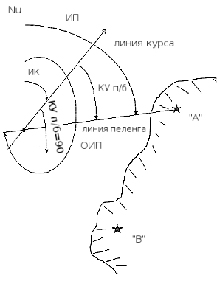
Напрямок руху судна визначається положенням його діаметральної площини (ДП). щодо північної частини істинного меридіана. Дійсний курс судна (ІК). Кут між північної частиною істинного меридіана і діаметральною площиною судна називається істинним курсом судна.
Дійсний пеленг (ІП). Кут між північної частиною істинного меридіана і напрямком на спостережуваний предмет називається істинним пеленгом.
Навігаційна морська карта – карта на якій позначаються глибина грунтів, берегова лінія, рельєф водоймищ, навігаційні знаки і можливу небезпеку. Завдяки добре викладеній інформації моряки можуть прокласти безпечний шлях для судна враховуючи всі особливості місцевості(погоду, флору та фауну).
Перші плавання відбувалися вздовж берегів, вони не потребували великих знань та не було ніяких проблем щодо прісної води. Прокладання шляху полягало: як добратися від одного берегу до іншого. Відповідно можна стверджувати що спершу довжина плавання була коротка, з часом збільшувалась і сьогодні ми маємо хорошу можливість подорожувати навколо світу. Але існують такі дані що навіть тисячі років тому відбувалися міграції через океани, наприклад сибірських племен.
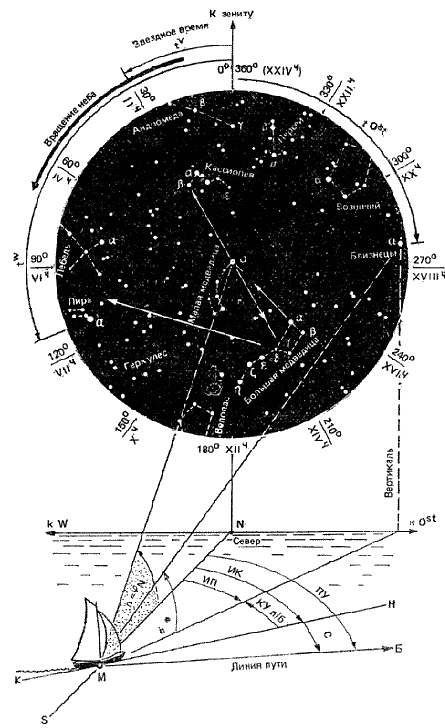
Першим способом визначення шляху для судна були небесні світила, так званий орієнтири на око. Завдяки сонцю визначали схід та захід, завдяки зорям – інші сторони світу. Використовували різні сузір’я, як полярну зірку в сузір’ї малої та великої ведмедиці так і по сузір’ї південний хрест(якір).
Кожен досвідчений моряк навіть сьогодні має вміти ходити під зірками, адже вони заміняють багато приладів. Адже за небесними світилами ми можемо визначити час, географічне місце розташування судна, вираховує рух корабля без компаса.
Перш за все орієнтувалися за сузір’ям малої медведиці. На зоряному небі було дуже легко знайти її і відповідно визначати собі курс. Найяскравіша зірка – Полярна, вказувала на північ. Направлення на обране світило виявляє його дійсний пеленг. Пеленг – це кут між північчю і орієнтиром.
Що ж сприяло визначенню шляху для судна?
 Небесні світила – Завдяки сонцю визначався Схід і Захід. Також бралися до уваги різні сузір*я (Мала, Велика Ведмедиця). Вміння ходити під зірками є необхідним для кожного моряка.
Небесні світила – Завдяки сонцю визначався Схід і Захід. Також бралися до уваги різні сузір*я (Мала, Велика Ведмедиця). Вміння ходити під зірками є необхідним для кожного моряка.
Власне орієнтування за сузір’ям малої ведмедиці на початках було найбільш популярним. Найяскравіша зірка – Полярна, вона вказує на Північ.
5. Еволюція навігаційного обладнання
 Перші карти були досить примітивними. Це були так звані нариси як пройти від одного порту до іншого. Вони не були точними. Лоцмани(люди, що відповідали в той час за навігацію) були зацікавлені в тому, щоб знати рельєф. На них наносились лише деякі навігаційні небезпеки. Чим більша територія наносилась, тим більше було похибок, адже ще не було такого розуміння, що світ круглий та на картах можуть бути спотворення.
Перші карти були досить примітивними. Це були так звані нариси як пройти від одного порту до іншого. Вони не були точними. Лоцмани(люди, що відповідали в той час за навігацію) були зацікавлені в тому, щоб знати рельєф. На них наносились лише деякі навігаційні небезпеки. Чим більша територія наносилась, тим більше було похибок, адже ще не було такого розуміння, що світ круглий та на картах можуть бути спотворення.
Морські навігаційні небезпеки – перешкоди, що представляють реальну загрозу для плавання корабля (судна). Піднесення дна і будь-які природні та штучні об’єкти в шарі води від поверхні до поглиблення розташованих нижче кіля пристроїв (керма, гвинти, висувні пристрої гідроакустичних станцій і т. д.) для корабля потенційно небезпечні. Крім того, необхідно мати певний запас «чистої» води для запобігання засмічення забортних отворів і фільтрів мулом, піском і пр. При плаванні в небезпечних районах для розрахунку безпечної глибини враховується глибина захисту. Природні навігаційні небезпеки утворені рельєфом морського дна.
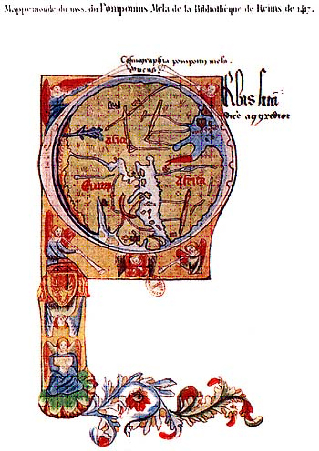
 Перші карти містили лише естетичне бачення світу. (I-ше століття до нашої ери).
Перші карти містили лише естетичне бачення світу. (I-ше століття до нашої ери).
Вивчення всіх портів, читання інформації про мореплавство, мореплавання вдалося розширити, оскільки була можливість точніше намалювати світ. Це вдалося Плометею (II-ге століття н.е.). Завдяки розумінню широти і довготи можна було визначити місце розташування судна на поверхні Землі. Вночі розташування судна вираховувалося за допомогою приладу під назвою
Мілини – неочікувана глибина, яка є порівняно меншою з навколишніми частинами.
Банка – різне підняття морського дна.
Підводна коса – дуже вузька та довга міль, яка є підводним продовженням острова чи миса.
Бар – міль, яка відділяє море від річки.
Скеля – різке підвищення з дна, яка є з твердої породи.
Риф – небезпечне для плавання підводного або відсихаю ще підвищення морського дна з скалистим грунтом.
Кораловий риф – підводне або надводне скупчення відмерлих коралових поліпів, або інших відмерлих організмів.
6. Основне навігаційне обладнання:
Астролябія – кутомірний інструмент, який служить для виявлення положення небесних світил. З часом араби доповнили його і стали використовувати для знаходження часу, тривалості дня і ночі, вимірянь горизонтальних кутів на поверхності землі і для астрономічних передбачень.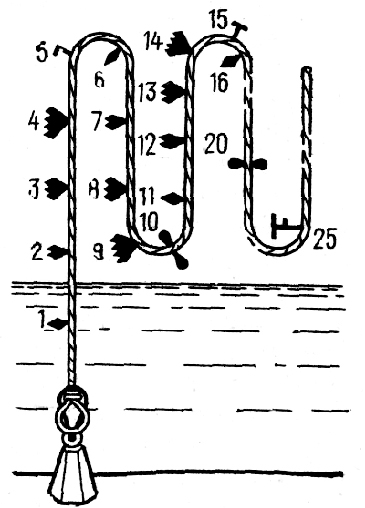
Завдяки цьому пристрою можна було визначити точне розташування судна. Таким способом моряки могли прокладати шляхи не лише по морю, почали мандрувати й через океани. З’явилося таке поняття як курс судна – кут між діаметричною плоскістю судна і направленням на північ.
Згодом багаторічні дослідження доводять, що магнетизм має неабиякий вплив на навігацію. Опираючись на такі факти виникає пристрій
Буссоль – один із різновидів компасу. Він дозволяє вираховувати магнітний азимут у морі.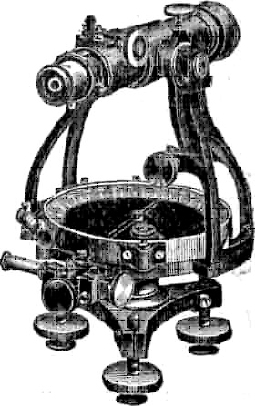
Найважливіший і найлегший у використанні пристрій це – Компас. Перший компас являв собою плаваючий наповнений водою в раковині кусочок дощечки, на одному кінці був прикріплений каламіт. Компас – пристрі призначений для визначення напрямку. Його стрілка показує на північ. Досить важливим є те, що північний магнітний полюс (на який нам показує магнітний компас) не збігається за розташуванням із географічним. Тобто магнітна і географічна, або істина, північ не є тотожними поняттями. Різниця між ними називається магнітним відхиленням. Тому існують таблиці магнітного відхилення складені для певної місцевості і спеціальні позначки на морських картах.
Еволюція навігаційних приладів йшла далі вгору і в 1942 році було винайдено Глобус. Створенням першого глобуса прославився німецький географ і мандрівний Мартін Бехайм. У 1942 році він виготовив глобус «Земне яблуко» діаметром 54 сантиметри і відобразив найбільш передові географічні уявлення того часу (напередодні відкриття Нового Світу) про поверхню Землі.
Лот – пристрій для виміру глибини моря зі судна. Являє собою трос(линва), на якому позначено(вузликами для прикладу) відстань з грузилом(лотом) на кінці. Грузило переважно було зі свинцю, масою переважно 15 кг для великої глибини, або 7 кг для менших. Лот кидали за борт, коли він діставав дна морякподава сигнал та починав відраховувати по вузликах. Сучасний аналог називається – Ехолот.
Лаг – пристій для визначення швидкості руху судна відносно води(напр. коли корабель пливе за течією швидкість фактична є більшою ніж швидкість відносно води).
В давнину використовувався так званий секторний лаг. Це була дощечка, до якої прикріплювався шнурок. Вона викидалася за борт і відраховувалися вузлики, зав’язані на шнурку на певній відстані, за проміжок часу. Так і визначали швидкість руху.
Хронометр – механічний годинник з особливо точним ходом, похибка якого становить лише декілька секунд за добу. Він слугує для точного визначення довготи, яку вираховують за різницю між місцевим часом астрономічного явища (схід сонця) та часом даного астрономічного явища на довготі однієї з обсерваторій.
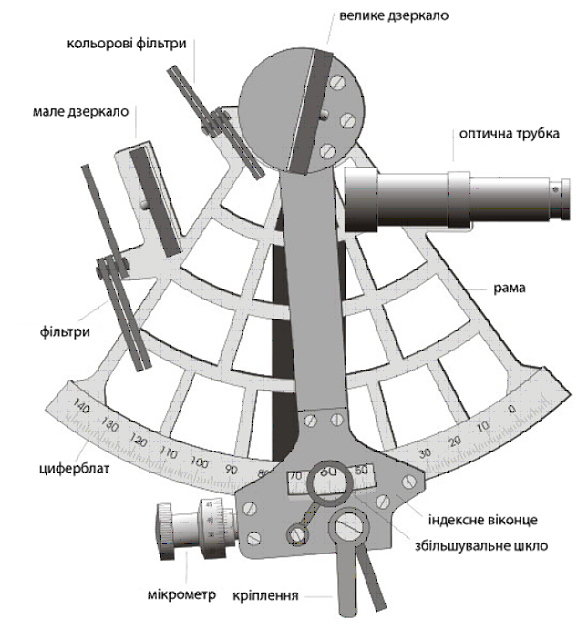 Секстант – оптичний прилад для вимірювання величини кута між двома видимими об’єктами. Секстант найчастіше застосовується для вимірювання висоти астрономічних об’єктів над горизонтом. Дозволяє з дуже високою точність виміряти місце розташування судна.
Секстант – оптичний прилад для вимірювання величини кута між двома видимими об’єктами. Секстант найчастіше застосовується для вимірювання висоти астрономічних об’єктів над горизонтом. Дозволяє з дуже високою точність виміряти місце розташування судна.
Для вимірювання вертикального кута між світилом а та горизонтом секстант розміщують у вертикальній площині, що проходить через дане світило. Мале і велике дзеркала перпендикулярні до площини його рами. Горизонт безпосередньо попадає в око спостерігача. А промінь від світила попадає у велике дзеркало, яке повертають рухомою лінійкою – алідадою в таке положення при якому цей промінь пройде через мале дзеркало і попаде в око спостерігача. Отім, повертаючи алідаду або мікро гвинт досягають точного спів падіння проекції світила з горизонтом. При спостереженні сонця використовують світлофільтри (1 та 4).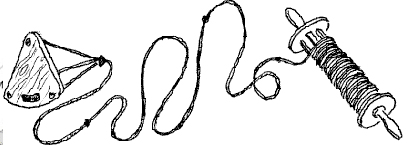
Сучасні способи навігації. GPS
GPS, Систе́ма глоба́льного позиціонува́ння (англ. Global Positioning System) – сукупність радіоелектронних засобів що дозволяє визначати положення та швидкість руху об’єкта на поверхні Землі або в атмосфері. Положення об’єкту обчислюється на ньому завдяки використанню GPS-приймача, який приймає та обробляє сигнали супутників космічного сегменту GPS системи глоба́льного позиціонува́ння. Для визначення точних параметрів орбіт супутників та керування, GPS система в своєму складі має наземні центри управління.
Принцип дії. GPS-приймач обчислює власне положення, вимірюючи час проходження сигналу від GPS супутників. Кожен супутник постійно надсилає повідомлення, в якому міститься інформація про час відправки повідомлення, точку орбіти супутника, з якої було надіслано повідомлення, та загальний стан системи і приблизні дані орбіт всіх інших супутників угрупування системи GPS (альманах). Ці сигнали розповсюджуються зі швидкістю світла у всесвіті, та із трохи меншою швидкістю через атмосферу. Приймач використовує час отримання повідомлення для обчислення відстані до супутника, виходячи з якої, шляхом застосування геометричних та тригонометричних рівнянь обчислюється положення приймача. Отримані координати перетворюються в більш наочну форму, таку як широта та довгота, або положення на карті, та відображається користувачеві.
Оскільки для обчислення положення необхідно знати час з високою точністю, необхідно отримувати інформацію із 4-х або більше супутників задля усунення необхідності в надточному годиннику. Іншими словами, GPS приймач використовує чотири параметри для обчислення чотирьох невідомих: x, y, z та t.
Застосування GPS. Не дивлячись на те, що проекти побудови GPS-систем впроваджувались військовими відомствами, зараз окрім приймачів спеціального призначення випускаються прилади, вмонтовані в різноманітну дрібну техніку: наручні годинники, мобільні телефони, ручні радіостанції, портативні комп’ютери та фотоапарати, за допомогою яких можна орієнтуватись на місцевості або фіксувати місцезнаходження користувача. Їх використовують альпіністи, рятівники, туристи.
Навігація: із застосуванням GPS здійснюється як морська так і дорожня навігація. Супутниковий моніторинг транспорту: за допомогою GPS на диспетчерському пункті ведеться спостереження за маршрутом руху, швидкістю та іншими параметрами транспорту.
Точність. Зважаючи на відстань між приймачем та супутниками точність обчислення положення залежить від багатьох факторів та визначається лише з деякою вірогідністю. Радіосигнали супутників можуть екрануватись або відбиватись оточенням приймача, що збільшує похибки визначення часу надходження сигналу та спотворює результат вимірювання.
В першу чергу мають значення атмосферні явища та поточне розташування супутників відносно приймача. Похибка обчислення положення буде більшою, якщо всі доступні супутники сгруповані в одній півкулі відносно приймача в порівнянні з ситуацією, коли приймач має змогу отримати сигнали супутників з різних боків. Ситуація обмеженої видимісті супутників досить поширена в містах завдяки екрануванню сигналів спорудами.
Звичайна точність сучасних GPS-приймачів в горизонтальній площині становить 5-10 метрів, та 10-20 метрів за висотою, але за збігом деяких умов, обчислене приймачем положення може короткочасно відрізнятися на значно більші величини. Виробники GPS приймачів визначають величину похибки положення так: не гірше 5 метрів в 50% часу спостереження, та не гірше 8 метрів в 90% часу, похибка визначення швидкості не більше 0,06 м/с.
Недоліки. Загальним недоліком використання будь-якої радіонавігаційної системи є те, що за певних умов сигнал може не доходити до приймача, або приходити із значними спотвореннями або затримками. Наприклад, практично неможливо визначити своє точне місцезнаходження в глибині квартири усередині залізобетонної будівлі, в підвалі або в тунелі. Оскільки робоча частота GPS лежить в дециметровому діапазоні радіохвиль, рівень прийому сигналу від супутників може серйозно погіршитись під щільним листям дерев або через дуже велику хмарність. Нормальному прийому сигналів GPS можуть завадити перешкоди від багатьох наземних радіоджерел, а також від магнітних бурь.
Морські карти:
Класифікація карт. Всі морські карти за своїм призначенням поділяються на чотири основні групи: навігаційні, спеціальні, довідкові, озерні і річкові.
Навігаційні морські карти призначені для забезпечення безпеки судноводіння. Залежно від своїх масштабів вони поділяються на плани, приватні, шляхові та генеральні карти.
- Плани (масштаб 1:1000 – 1:2 5 000) служать керівництвом для заходження суден в порти, гавані, бухти, на рейди і т. д.
- Приватні карти (масштаб 1:2 5 000 – 1:7 5 000) призначені для забезпечення безпеки плавання в районах, складних у нави-гаціонно-гідрографічне відношенні: в узкостях, в шхерах, в безпосередній близькості від берегів і т. д.
- Шляхові карти (масштаб 1:100 000 – 1:500 000) служать для забезпечення плавання між портами як у видимості, так і поза видимості берегів і берегових орієнтирів. Карти цього типу є-ються основним і найбільш поширеним типом морських навігаційних карт.
- Генеральні карти (масштаб 1:500 000 – 1: 5 000 000) використовуються для загального вивчення умов переходу океаном або морем і, як правило, для попередньої прокладки шляху корабля.
Спеціальні карти видаються для забезпечення вирішення завдань навігаційно-прикладного та спеціального характеру. Найбільш поширеним типом з них є: радіонавігаційні, карти радіомаяків і радіостанцій, навігаційно-промис-ловие, карти-сітки і бланкові карти.
- Радіонавігаційні карти (масштаб 1:750 000 – 1:3 500 000) – генеральні карти в меркаторській проекції зі спеціальними сітками для визначення місця судна за допомогою новітніх навігаційних систем.
- Карти радіомаяків і радіостанцій (масштаби 1: 1 000 000 – 1: 1 500000) показують точне місце розташування радіомаяків і радіостанцій, які обслуговують мореплавання, і зазвичай будуються в стереографической проекції, що дозволяє прокладати радіопеленг прямими лініями без помітних спотворень.
- Навігаційно-промислові карти (масштаби 1: 500 000 і дрібніше) призначені для навігаційного забезпечення риболовецьких суден; на відміну від звичайних навігаційних карт на них показані місця, небезпечні для спуску тралів та інших донних знарядь лову.
- Карти-сітки (масштаби 1:150 000 – 1:500 000) будують, як правило, в меркаторській проекції на окремі широтні пояси і використовують для прокладки шляху судна у відносно великому масштабі; на відміну від навігаційних карт карти-сітки не містять жодних елементів картографічного зображення, крім сітки меридіанів і паралелей.
- Бланкові карти (масштаби 1:500 000 – 5 000 000 і дрібніше) служать найпростішої географічної основою для складання різних картосхем і збірних аркушів.
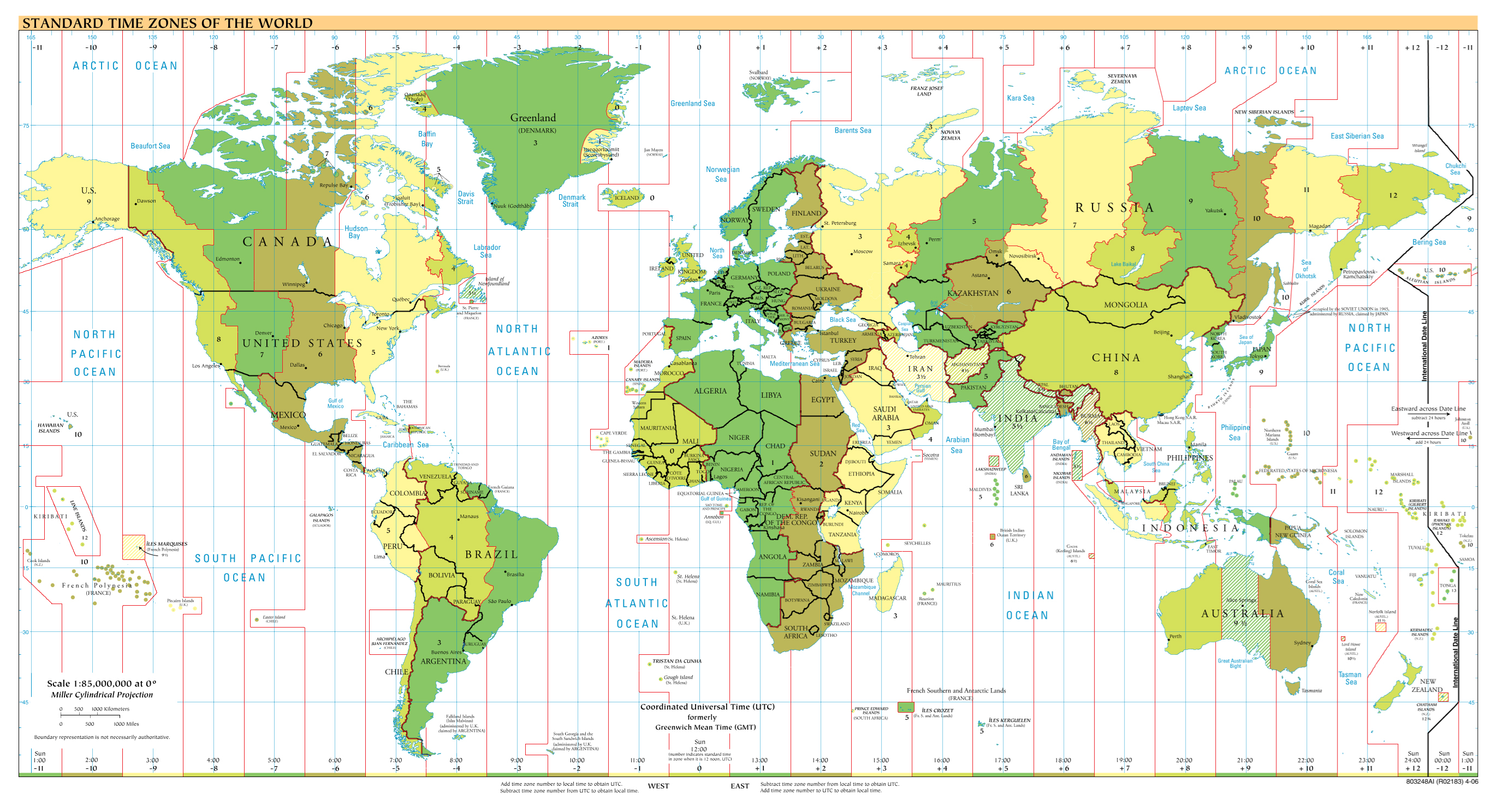
Довідкові карти безпосередньо для навігаційних цілей не використовують. Вони є допоміжними картографічними виданнями, що містять лише деякі необхідні мореплавцям дані. До них відносяться: оглядові карти, карти часових поясів і збірні аркуші карт.
- Оглядові карти (масштаби 1:650 000 – 1:20 000 000) дають загальне уявлення про навігаційно-гідрографічних, фізико-географічних і економіко-географічні особливості зображених на них районів.
- Карти часових поясів представляють собою дрібномасштабні бланкові карти світу або окремих держав із зазначенням меж і номерів часових поясів разом з текстом (легендою), поясняющим користування картами.
- Збірні листи є бланковими картами океанів і морів з визначеними кордонами (рамками) навігаційних або інших морських карт великого масштабу. Збірні листи служать для підбору необхідних карт і визначення їх номерів.
Озерні та річкові карти призначені для забезпечення безпечного плавання на озерах і судноплавних річках.
- Озерні карти (масштаби 1:100 000 – 1:250 000) по своїй математичній основі, елементам змісту і умовним позначенням не відрізняються від морських навігаційних карт.
- Річкові карти (масштаби 1:10 000 – 1:100 000) являють собою зображення річок з береговою смугою і берегової топографією. На них вказуються рельєф дна, виражений відмітками глибин і ізобата, фарватери (із зазначенням їх протяжності в кілометрах) і деякі інші елементи, необхідні для судноводіїв.
Зміст карт. Змістом морських карт називають сукупність всіх наносяться на неї елементів: математичної основи, елементів морської обстановки і елементів оформлення карти.
Внутрішню рамку морських і озерних карт складають крайні меридіани і паралелі; разом з проміжними вони утворюють картографічну сітку карти.
Внутрішня рамка карти розбита на градусні і хвилинні ділення: по меридіану – широтні, по паралелі – довготні. Таким чином, обидві бічні рамки карти є лінійним масштабом і служать для вимірювання відстаней на карті, а також для зняття географічної широти місця. Нижня і верхня рамки служать для зняття географічної довготи місця.
Генеральні карти – служать для ведення числення шляху судна при плаванні у відкритому морі, попередньої прокладки і загальних навігаційних розрахунків.
Дорожні карти призначаються для забезпечення плавання поблизу берега і на деякій відстані від нього.
Приватні картки призначені для забезпечення судноводіння при плаванні в безпосередній близькості від берегів і обмежених навігаційних умовах,
Плани призначаються для забезпечення входу в порти, гавані, бухти, на рейди, якірні місця і для плавання в межах їх акваторії.
Спеціальні навігаційні карти відрізняються від загальних навігаційних карт тим, що мають додаткове навантаження для вирішення окремих навігаційних та інших завдань. До спеціальних навігаційних карт відносяться: радіонавігаційні карти, навігаційно-промислові карти.
Прокладання курсу:
Інструменти для прокладання курсу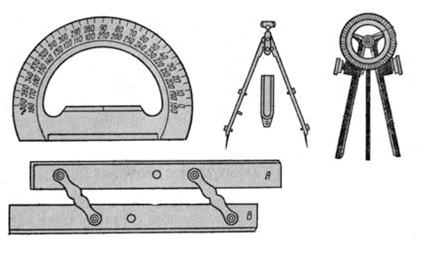
До інструментів відносяться вимірювальні циркулі, паралельні лінійки, навігаційні транспортири, протрактори.
Вимірювальний циркуль (вимірювач) служить для вимірювання та відкладання відстаней на карті. Він складається з двох ніжок, шарнірно з’єднаних за допомогою виделки, на якій є обушок з кільцем. На ніжках циркуля гвинтиками кріпляться знімні сталеві голки.
Паралельна лінійка призначена для проведення прямих ліній і ліній, паралельних заданим. Вона складається з двох дерев’яних лінійок, які з’єднані між собою двома рівної довжини латунними тягами на шарнірах. Останнім часом випускають паралельні лінійки з органічного скла, які зручні тим, що не закривають зображення карти. Шарнірне з’єднання дозволяє пересувати лінійку, зберігаючи заданий напрямок, що особливо важливо при прокладці курсів і пеленгів. У разі, коли потрібно визначити напрямок прокладеної на карті лінії, до неї прикладають лінійку і вимірюють транспортиром кут перетину її з меридіаном. Щоб через задану на мапі точку провести лінію, паралельну заданому напрямку, лінійку зі складеними разом половинками прикладають зовнішнім краєм верхньої лінійки уздовж такої лінії. Потім щільно притискають до карти одну з лінійок, а іншу обережно пересувають доти, поки зовнішній край другий лінійки не підійде до наміченої точці, після чого олівцем проводять лінію через задану точку.
Навігаційний транспортир служить для побудови та вимірювання кутів на карті. Зазвичай він використовується разом з паралельною лінійкою для прокладки курсів і пеленгів. Транспортир являє собою півколо з лінійкою. Зовнішній зріз дуги транспортира градуйований. Подовжені штрихи відзначають п’ятиградусний поділу. Штрихи, що вказують десятки градусів, відзначені двома цифрами, що відрізняються на 180 °. При цьому верхні цифри відповідають напрямам північної половини картушки компаса, а нижні – південної.
Для того щоб прокласти на карті лінію під певним кутом до меридіану, транспортир накладають на карту так, щоб центральний штрих транспортира і чорта, що позначає заданий число градусів, опинилися на лінії меридіана. За цієї умови лінія, проведена уздовж зрізу лінійки в належну сторону, дасть потрібний напрямок.
Протрактор призначається для нанесення на карту місця судна, отриманого за двома горизонтальним кутам, які визначаються між напрямками на три берегових об’єкта. Він складається з металевого кола і трьох лінійок. Середня лінійка жорстко пов’язана з колом, а крайні можуть повертатися щодо його центру на будь-який кут. Металевий коло градуйований через 0,5 °. Для нанесення на карту місця судна бічні лінійки протрактора встановлюють по відношенню до середньої відповідно вимірюються кутів. Потім протрактор кладуть на карту, суміщають зрізи двох лінійок із зображеннями двох відповідних предметів і пересувають протрактор таким чином, щоб зріз третьої лінійки пройшов через зображення третього предмета. При цьому центр кола приладу вкаже обсервованное місце судна, яке відзначається олівцем. Основна перевага протрактора полягає в тому, що він дозволяє наносити місце судна з великою точністю.
Визначення руху корабля
Пеленг – морський аналог сухопутного слова азимут – кут між Північчю та напрямком на орієнтир. Їх використовують для визначення напрямку руху та положення корабля на карті.
Курсом корабля називають кут між його поздовжньою віссю (ніс-корма) та напрямком на Північ. Розрізняють магнітний та істиний курс (в залежності до якої –магнітної чи істиної Півночі ми його розраховуєм). Пересуваючись за допомогою двигуна по абсолютно стоячій воді судно рухається по прямій лінії, яка співпадає із поздовжньою віссю корабля. Тоді напрям руху співпадає із курсом. Якщо корабель рухається під вітрилом йому притаманний дрейф. В такому випадку напрям руху є відмінним від курсу. Якщо судно рухається великою річкою чи в тих районах світового океану де є течії воно попадає під вплив течій.
Обрахування шляху судна
Найбільше що впливає на рух корабля – це вітер. Він викликає аеродинамічну силу, яка просто може знести все, це залужить від ряду факторів, найважливіші – це розміри надводної частини корабля. Напрямок і швидкість повітря відносять корабель. Відповідно ми можемо спостерігати дійсний вітер – його ми може мо виміряти, відчуваємо на надводній частині. Вітер, який нам здається – який ми можемо відчувати на самій палубі.
На картинці ми бачимо дрейф корабля вправо, ще це називають вітряний дрейф. Корабель іде лівим галсом що до відношення до вітру(вітер дує в лівий борт корабля ) відповідно його буде зночити вправо.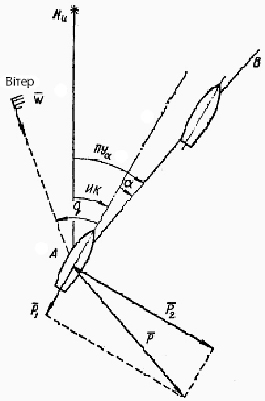
Дрейф – повільне знесення будь – чого:
- Дрейф судна від вітру з лінії курсу, він характеризується кутом між лінією шляху і лінією дійсного шляху.
- Дрейф судна, який стоїть на якорі, через вітер або течію, якір під грунт
Коли іде обрахунок куди кораблю потрібно направитись, обдумується питання чи не змінить шляху погодні умови чи течія водойми, адже вони можуть допомогти у мореплаванні.
Визначення місце розташування за двома предметами
Нехай ми маємо предмет А(маяк) ми його бачимо по дійсному пеленгу 1, а предмет В в той же час по пеленгу 2. Взявши компасні дані цих предметів і виправивши їх , получимо значення істинне значення пеленгів цих предметів. Проклавши їх на карті , у точці де перетнуться лінії цих пеленгів(т. М) получимо місце де розташований корабель.
Так само проводиться місцезнаходження судна за трьома предметами. Але якщо ці продовжувані лінії не перетнулися, значить десь виникла помилка.
Суть навігаційних визначень розташування
Помилки числення через неточності в показаннях компаса і лага, як вказувалося раніше, збільшуються із збільшенням часу плавання. Крім того, під впливом хвилювання, вітру і течії судно зміщується від заздалегідь наміченої лінії курсу, і як би ретельно не велися прокладка на мапі та визначення счислимого місця, точне місце розташування судна не може бути визначено, а отже, не можна забезпечити безпеку плавання.
Для виключення помилок у обчисленні необхідно періодично визначати точне місцезнаходження судна, здійснювати контроль за правильністю показань компаса і лага, а також розраховувати фактичні значення елементів течії і дрейфу. Ці завдання вирішують різними способами. При плаванні поблизу берегів застосовують навігаційні способи визначення місця судна, засновані на візуальному спостереженні та вимірюванні за допомогою морехідних інструментів відстаней до наземних орієнтирів, координати яких відомі, а також і їх напрямки по відношенню до судна.
Орієнтирами при цьому можуть служити вершини гір, миси, скелі і т. п. і спеціальні засоби навігаційного обладнання (СНТ). При поганій видимості, а також при плаванні далеко від берегів вдаються до використання радіотехнічних засобів (радіопеленгаторів, радіомаяків, радіолокаторів і т. п.). Прийоми використання радіотехнічних засобів розглядаються в гол. VIII.
Лінії розташування
Основним прийомом вирішення завдань щодо визначення місця судна є графічний або графо-аналітичний, заснований на понятті про лінії положення (лп).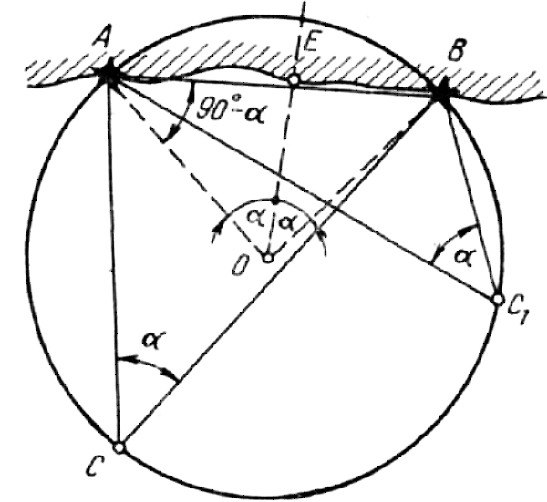
Лінією положення називається геометричне місце точок, з яких спостерігачі отримують однакові результати вимірювань одного і того ж об’єкта, тобто одні й ті ж величини або лінії рівного значення.
Простір від кожного орієнтира, нанесеного на карту, по відношенню до спостерігача може розглядатися як поле, що характеризується різними лініями положення. Вид їх залежить від величин, які вимірюють при спостереженнях.
Лінії рівних значень величин конкретного виміру називаються ізолініями. Ізолінії можуть бути складного виду, незручного для побудови їх на картах.
Визначення місця за двома горизонтальними кутами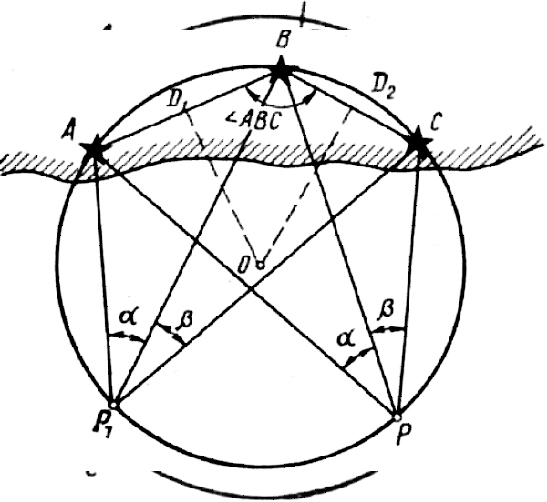
Коли з судна добре видно три орієнтира A. В і С, позначені на карті, між ними можна виміряти секстаном два горизонтальних кута: кут а між орієнтирами A і В і кут (3 між орієнтирами В і С. Кола, що вміщають дані кути, будуть лініями положення судна в момент спостереження.
Визначення місця за трьома пеленгами
Спосіб полягає у вимірюванні пеленгів трьох орієнтирів і є найбільш поширеним. Послідовність роботи повинна бути такою.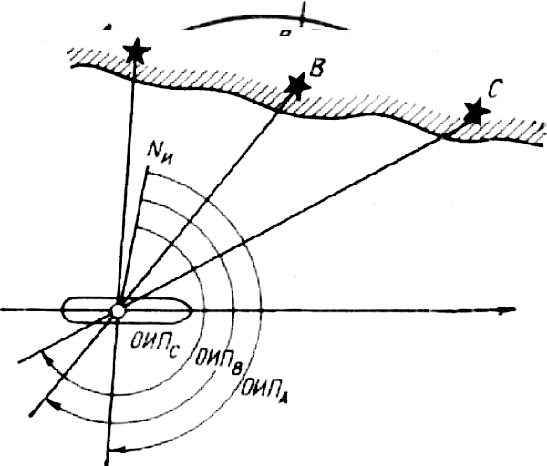
Вибирають на мапі три зручно розташованих орієнтира А, В і С і знаходять їх на території; беруть КП орієнтирів у певній послідовності, записують їх величини, а в момент взяття останнього пеленга помічають відлік лага і час; виправляють КП в ІП і прокладають ГІП на мапі від відповідних орієнтирів. Якщо пеленги взяті одночасно, то обсервованное місце судна буде в точці перетину ліній ГІП.
Визначення місця за двома пеленгами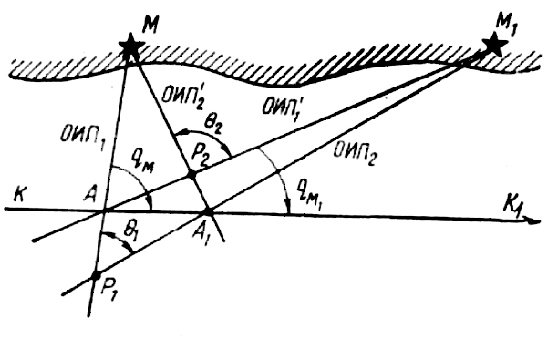
Спосіб визначення місця за двома пеленга найбільш простий і широко застосовується в практиці. Він полягає у вимірюванні пеленгів двох орієнтирів та отриманні місця судна в перетині ліній цих пеленгів.
Визначення місця за крюйс-пеленгами
Коли є лише один орієнтир, але відстань до нього визначено бути не може, то вдаються до методу крюйс-пеленга. Цей метод поєднує отримання ліній положення судна з урахуванням елементів числення – курсу судна і пройденого судном відстані, виміряного по лагу, за час між пеленгацією орієнтира. Тому отримане місце судна називається счислимого-обсервованной.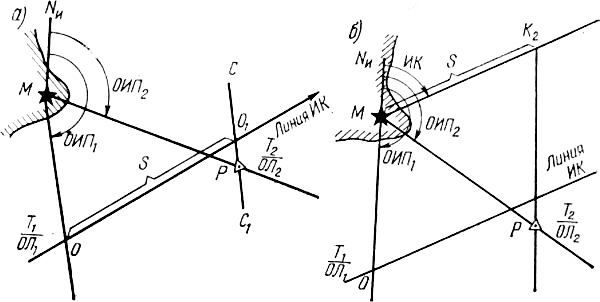
Спосіб визначення місця судна по крюйс-пеленгу полягає в наступному. У якийсь момент Т1 з точки О з судна беруть OКП1 орієнтира М і помічають відлік лага олг. Коли пеленг зміниться не менш ніж на 30 ° (що залежить від відстані до орієнтиру, від швидкості і курсу судна), беруть ОКП2 того ж орієнтира і помічають при цьому момент часу Т2 і ол2. Отримані компасні пеленги виправляють у щирі і визначають пройдену відстань 5, як різницю між відліку лага (ол2 – ол1), виправивши його поправкою лага. Зробивши прокладку ГІП, з точки О перетину лінії ОІП1 з лінією ІК відкладають в напрямку руху судна пройдену відстань S по лінії ІК. Через отриману точку О1 проводять лінію СС1 паралельну лінії ОІП1 до перетину з лінією ОІП2. Точка Р їх перетину буде счислимого-обсервованной місцем судна в момент часу Т2.
Отримання місця судна на карті, обумовленого по крюйс-пелен »гу, можна виконувати і іншими графічними прийомами, як, напри-заходів, від орієнтиру М по напрямку руху судна проводять лінію МК2, паралельну лінії ІК, і відкладають на ній величину S. З точки К2 проводять лінію, паралельну лінії ОІП1 яка в перетині з лінією ОІП2 дасть точку, відповідну місцем судна в момент взяття ОКП2.
Пеленг – морський азимут.
Радіонавігація – розділ навігації, який вивчає та розробляє теоретичні питання і практичне використання керування суднами за допомогою радіотехнічних приборів. Основні задачі, які вирішує радіонавігація : координати судна і їх місце розташування що до інших точок, направлення виходу в заданий район. Вирішують ці питання за допомогою радіокомпасів, радіомаяків, радіонавігаційної системи.
Радіомаяк – радіостанція, яка передає точні координати, працює самостійно або відноситься до радіонавігаційної системи. Тобто всі дані передає нам супутник, і можна отримати точні дані про місце розташування судна.
Для обчислення дійсного напрямку руху та швидкості корабля підраховують геометричну суму векторів:
- Курс та швидкість, відносно води (яку генерує двигун)
- Напрям та сила (швидкість дрейфу)
- Напрям та швидкість течії
Для того щоб корабель привести із одного місця в інше штурман зобов‘язаний визначити генеральний напрям, по якому слід буде вести цей корабель. Це називається попередньою прокладкою курсу. Коли яхта лягла на курс, тоді проводять контроль місця її положення одним із способів.
Як же відбувається покладка курсу?
Суть проста – визначити курс корабля при якому він би рухався в необхідному напрямку незважаючи на природні цьому перешкоди.
Крок 1
- спершу на карті малюють лінію – напрям руху.
Крок 2
- врахування течії. Знаючи її швидкість і напрям відкладають відповідний відрізок. Із точки що утворилася малюють коло. Його радіус пропорційний власній швидкості яхти. Сполучивши центр кола і точку його перетину із лінією напрямку руху отримують курс.
Крок 3
- знаючи дрейф судна на різних кутах атаки його враховують шляхом додавання/відніманя кута дрейфу від отриманого курсу в кроці 2.
Бортовий журнал – єдиний офіційний документ на кораблі. у випадку загибелі судна капітан зобов‘язаний прийняти всі міри для того щоб врятувати бортовий журнал.
Перші сторінки містять паспортну частину та різноманітні таблиці (дрейфу, девіації, похибки лагу та ін.). Далі на лівій сторінці записують курс, показники лагу. На правій – опис всього що відбувається з кораблем: вихід з порту проходження траверсів, підняття вітрил, сідання на мілину, дані про погоду, вітер і т.д. Записи вносять при кожній зміні курси чи по закінченні вахти. Ліва і права сторони є зв‘язані хронологічно. По закінченні одної з них перегортають на іншу сторінку.
Визначення положення судна на карті: Щоденна праця штурмана пов’язана із визначенням місця знаходження судна. Розрізняють два основних види визначення свого положення на карті: метод обчислення і метод спостереження. Сучасним методом визначення свого положення є визначення за допомогою GPS. Це прилад, який запеленгувавши мінімум два супутники може обрахувати з певною точністю місце положення судна.
Астронавігація:
Час. Земля протягом доби робить повний оберт навколо своєї осі. Завдяки цьому ми маємо день і ніч. Оскільки Земля обертається проти годинникової стрілки сонце сходить на Сході, а заходить на Заході. Чимточка на земній поверхні розташована східніше, тим там швидше сходить сонце і пізніше заходить. Отже, що далі на схід, то час є пізнішим. Саме тому земна куля поділена на часові пояси, в яких час відрізняється від Гринвіцького на рівне число годин. Точний місцевий (меридіанний) час відрізняється від поясного і залежить від географічної довготи місця знаходження судна. Його визначаємо за сонячним або зоряним годинником.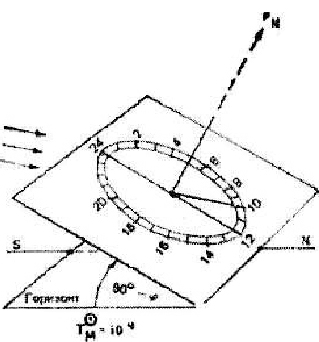
Найпростіший сонячний годинник можна виготовити наступним чином. Циферблат ділимо на 24 поділки і в його центр перпендикулярно ставимо шток. 24 годиною повертаємо на істину Північ. Знаючи широту свого місця знаходження розміщаємо циферблат під кутом 90° – φ до горизонту.
Визначення географічної широти. Ми знаємо , що напрямок на Полярну зірку є напрямком на північ. Отже, вона лежить на продовженні земної осі. Якщо спостерігати полярну зірку з екватора, ми побачимо її відразу над горизонтом (α=0°). Рухаючись в бік Північного полюсу, кут між горизонтом і полярною зростатиме, поки на полюсі не становитиме 90°. Отже, кут між горизонтом і Полярною зіркою рівний широті нашого місця знаходження.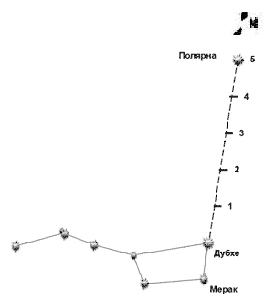
В період весняного або літнього рівнодення сонце (в полудень) знаходиться в зеніті на екваторі (α=90°), а на полюсі α =0°. отже в цей день широта φ=90°- α. Єдиною проблемою є те, що протягом року земля „нахиляється” по відношенню до сонця то в один то в інший бік. кут її нахилу залежить від часу спостереження. Щоб визначити широту в будь-який день потрібно врахувати відповідну поправку.
Визначення географічної довготи. Гіпарх із Нікен в 190-125рр. до н.е. запропонував визначати довготу різних точок за місцевим часом в той самий момент, напр в момент місячного затемнення. Пізніше для цього стали потрібними лише дві цифри: точний Гринвіцький і точний місцевий (меридіанний) час.
Гринвіцький час маємо на хронометрі корабля або визначаємо перерахувавши поясний час. Місцевий час визначаємо за сонячним годинником.
Оскільки Земля за 24 години повертається на 360° отримуємо 15° за 1 годину або 1° за 4 хвилини (1хв.=15′, 1′ =4с. і т.д.). Отже, якщо наш час на 1 год. 39 хв. більший за Гринвіцький, то наша довгота Х=15°х1 год. +(39хв.х15′)=21° 45′ східної довготи. Якщо б він був менший, то, відповідно, стільки ж західної довготи.
Завдання – прокладка курсу корабля:
- Видрукувати карти та задати уявні величини азимутів для кожного учасника. Попросити їх зорієнтувати карту та визначити своє місцезнаходження.
- Задати кінцеву точку маршруту. Роздати довільні дані учасникм (швидкість течії, швидкість вітру) та попросити прокласти курс враховуючи дрейф.
- Розібрати з учасниками, що було зроблено вірно, а що ні.
Висновок:
Орієнтування в просторі, одне з найнеобхідніших вмінь, яким повинна володіти людина. А морське орієнтування ще й ускладнюється багатьма факторами. Тому слід досконально володіти темою навігації при плануванні та прокладанні маршруту, а також враховувати всі змінні та постійні величини.
Якщо з серйозністю підходити до навігації, то можна уникнути багатьох небезпек в мандрах та оптимально скласти свій маршрут.
Дякую. Я додала посилання на Ваш сайт без Вашого дозволу у Вікіпедію “Секстант” за посиланням https://uk.wikipedia.org/wiki/%D0%A1%D0%B5%D0%BA%D1%81%D1%82%D0%B0%D0%BD%D1%82 , бо не змогла знайти діючу адресу, куди можна було б подати запитання.
Маю надію, що це не стане предметом спірних питань.
З повагою. Лілія